NIAC 2021
phase1 得到12.5萬美元 9個月 看概念是否可行。
phase2 是50萬美元 2年來證明
phase3 200萬美元 實現
https://zhuanlan.zhihu.com/p/3557758991、支持早期外星行星登陆(和运行)的风化层自适应修正系统(RAMs) =Regolith Adaptive Modification System (RAMs) to Support Early Extraterrestrial Planetary Landings (and Operations)
负责人及单位:Sarbajit Banerjee萨巴吉特班纳吉 得克萨斯A&M工程实验站
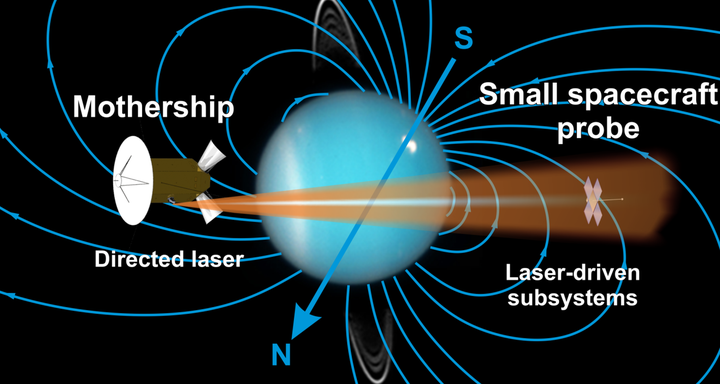
2、通过SCATTER探索天王星 = Exploring Uranus through SCATTER: Sustained ChipSat/CubeSat Activity Through Transmitted Electromagnetic Radiation
负责人及单位:Sigrid Close西格西德·克洛塞,美国斯坦福大学
3、 电弧烧蚀开采的原位资源利用 Ablative Arc Mining for In-Situ Resource Utilization
负责人及单位:Amelia Greig艾米莉亚·格雷格,美国德克萨斯大学
随着太空探索的扩展,包括人类远征到其他太阳系物体的表面,必须开发可持续的原地资源利用(ISRU)基础设施,以收集当地的水,建筑材料和推进剂资源。水是近期最关键的组成部分,因此是许多研究的重点。但是,将来能够使用同一系统开采其他资源将变得至关重要。因此,一个好的采矿系统应包括与尽可能多的其他本地材料平行地提取和收集水。使用电弧烧蚀表面材料会产生自由电离的粒子,这些粒子可按质量分类为材料组,并通过电磁场传输到相关的收集器。每种材料类型专用的收集器可以并行使用,以实现最大的收集效率和保存条件。电离消融电弧,电磁传输和分类以及收集器模块位于移动式表面履带机内,有可能导致人类太空探索的多种,高效且覆盖面广的原位资源利用。通过使用电弧既烧蚀和电离硬质合金颗粒,挥发物的运输和收集比热采矿技术中依赖的稀疏中性粒子的随机游走更加可控和有效。这提高了颗粒收集的速率,并减少了非预期表面上凝结引起的损失。使用磁场分离挥发物意味着该技术可以轻松地应用于单个系统体系结构中的任何重灰石成分,包括水和金属离子。
4、部署千米等级的太空结构 Kilometer-Scale Space Structures from a Single Launch
负责人及单位:Zachary Manchester扎克利·曼彻斯特,卡内基梅隆大学
为了在1-2RPM(每分钟转数)的转速下产生接近1g的人造重力环境,需要一种千米等级的太空结构。为了解决该问题,我们将利用机械超材料取得的最新进展,设计一种轻质量部署结构,膨胀率达到150倍以上。像这样的结构可部署在猎鹰重型火箭整流罩中,在太空轨道上进行伸展,达到长度1千米以上的最终尺寸,而不需要复杂的在轨组装或者制造,我们的研究将适用于类似“月球轨道空间站”的概念设计,1千米以上等级的可扩展结构将成为大型旋转太空站主干部分。
5、被动扩展偶极子阵列月球探测仪(PEDALS) PEDALS: Passively Expanding Dipole Array for Lunar Sounding
负责人及单位:Patrick McGarey帕特里克·麦克高瑞,美国宇航局喷气推进实验室
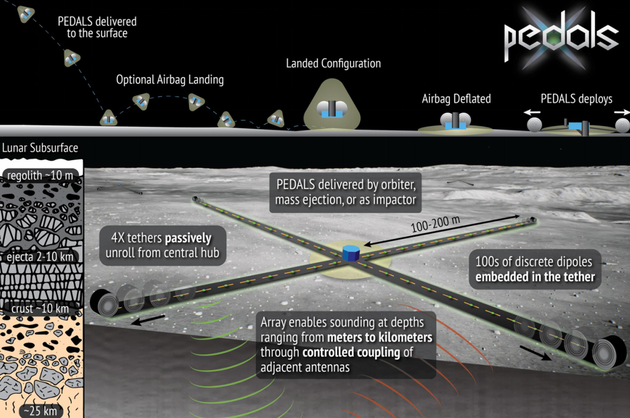
理解类地行星地下组成和结构是揭晓其地质历史演变的关键,其中包括:地壳分化、火山作用、沉积作用、盆地形成和挥发性运输和聚集。通常采用的地下探测设备是雷达,它可以通过基于地球的双基站、轨道或者表面结构来实现,在每种情况下,合并雷达仪器的任务操作天线都具有固定共振频率,通常限制在一个或者两个工作频带。目前,火星轨道设备MARSIS在迄今所有轨道探测雷达中具有最大天线(40米),它可提供千米等级的穿透勘测和全球覆盖范围,但由于信噪比较低、分辨率较低、表面反射模糊等原因,导致勘测数据失真度较高。考虑到使用单一、固定长度偶极天线产生的频带有限性,我们建议采用被动扩展偶极子阵列月球探测仪(PEDALS),它包含一系列离散偶极天线,通过特殊组成和短偶极耦合扩展到更大的区域,通过频率和深度变换能有效提高分辨率。PEDALS的关键创新之处在于其独特能力,可以从不同的空间位置测量广泛而连续的深度范围,这是之前探地雷达装置无法实现的。PEDALS利用形状记忆材料被动展开4个系绳,并计划在未来各种月球勘测任务中使用。驱动PEDALS任务的关键科学目标包括对比地壳厚度从而理解地壳结构的深度,以及测量表面风化层挥发物分布,探测地下空洞等。
6、自主深井钻孔机器人 Autonomous Robotic Demonstrator for Deep Drilling (ARD3)
负责人及单位:Quinn Morley奎因·莫理,行星企业公司
7、 紧凑型,超功率密集型放射性同位素电池可实现太阳外物体拦截器和样品返回 Extrasolar Object Interceptor and Sample Return Enabled by Compact, Ultra Power Dense Radioisotope Batteries
Christopher Morrison克里斯托弗·莫里森 超安全核技术公司
USNC- Space
Seattle, WA 98199-1258
2021 Phase I
USNC-Tech正在提议一种紧凑型20 kWe,500 kg干重,放射性同位素-电力推进的航天器设计,该航天器将由新型可充电原子电池(CAB)供电,并通过动力系统能够以100 km / s的速度提供∆Vs比质量为5-8 kg / kWe。采用这种技术的航天器将能够在10年的时间内到达太阳系外物体,收集样本并返回地球。
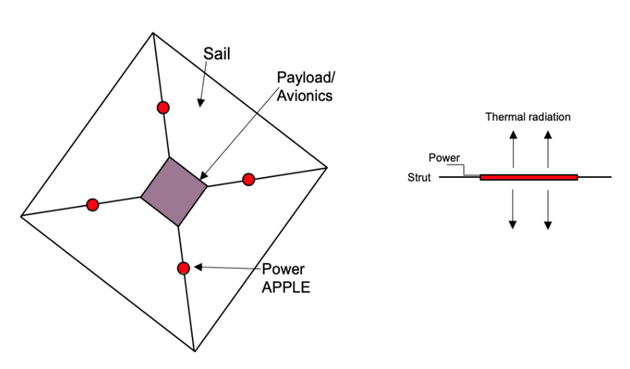
8、 轻型勘探的原子能太阳帆(APPLE) Atomic Planar Power for Lightweight Exploration (APPLE)
=>
https://familystar.org.tw/index.php?option=com_smf&Itemid=45&topic=25225.msg259128#msg259128NASA
https://www.nasa.gov/directorates/spacetech/niac/2022/Atomic_Planar_Power/
E. Joseph Nemanick约瑟夫·内曼尼克 航空航天公司
轻型探索的原子能太阳帆(APPLE)是一种用于在低质量,快速运输的太空平台上进行深层太阳系任务的启用架构
9、使用原位推进剂实现土卫六样品返回,是一个预想的土卫六样品返回任务 A Titan Sample Return Using In-Situ Propellants
Steven Oleson史蒂文·奥尔森,NASA格林研究中心
===
http://www.jintiankansha.me/t/QxyuqtCYRwNASA创新先进概念NIAC·2021年第一阶段研究项目简介(2)(共16个项目,后7个项目)
10. ReachBot: Small Robot for Large Mobile Manipulation Tasks in Martian Cave Environments
适用于火星洞穴环境中移动操作任务的小型机器人
Marco Pavone
11. FarView - An In Situ Manufactured Lunar Far Side Radio Observatory -原位制造的月球远端无线电天文台
Ronald Polidan
我们建议进行一次端到端的系统级研究,以研究如何使用月球巨石材料在月球远端建造一个非常大的低频(5-40 MHz)无线电观测台“ FarView”。 FarView将是一个约100,000个偶极天线的稀疏阵列,将占据一个约20x20 km的区域。支持FarView的创新技术元素将成为ISRU的几乎专有用途,并且几乎可以在现场制造无线电阵列的几乎所有系统元素,包括发电和储能系统。 FarView科学专注于使用高度红移的21cm氢原子线对未探索的宇宙黑暗时代的精致细节进行研究,并确定形成第一批恒星,星系和吸积黑洞的条件和过程,而今天还没有类似的天文台。这种射电望远镜将是这种规模和灵敏度的同类望远镜中的第一款,它将为早期宇宙打开一个新的窗口(低频射电),类似于LIGO对重力波的探测和Planck对CMB的探测。由于地球产生的无线电噪声和电离层,无法从地球进行这些测量。使用原位制造技术和偶尔从Earth进行系统升级,FarView可以不断发展并具有长寿命。与从地球发射的完整天线阵列相比,它将具有更低的成本和更长的使用寿命。
发展月球表面基础设施(电力系统,能量存储系统,太空制造资产,太空采矿资产),以实现未来的月球表面科学和商业任务。从重石料加工活动中提取和精炼氧气和金属,用于未来的月球前哨基地和其他太空制造以及月球表面和太空中的人类太空飞行活动。

12. FLOAT -- Flexible Levitation on a Track 基于石墨烯柔性膜的月球悬浮轨道运输系统
Ethan Schaler
13. SWIM -- Sensing with Independent Micro-swimmers —使用独立的传感器的微型游泳机器人
Ethan Schaler
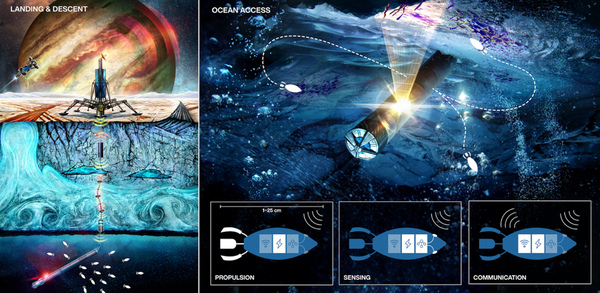
未来数十年的太空探索将集中在海洋世界上,尤其是土卫二,欧罗巴和土卫六,它们在几公里冰冷的地壳以下的液态海洋是地球以外最可能栖息生物的地方。为了进入这些水生环境,美国国家航空航天局正在开发和完善众多的海洋访问任务概念,包括欧洲科学探索地下访问机制(SESAME)类的热机械钻探机器人。我们建议开发SWIM(使用独立的微传感器进行感应)来显着扩展SESAME级海上机器人飞行任务的功能,并显着增加其检测可居住性/生物标记物/生命证据的可能性。
SWIM系统由厘米级的3D打印游泳微型机器人(微型游泳者)组成,该微型机器人配有MEMS传感器,由微型执行器推动,并通过超声波进行无线控制。微型游泳者既可以单独部署,也可以从单个SESAME机器人母舰中蜂群部署,一旦到达/锚定在海冰界面上,机动性就会受到限制。 SWIM可以对SESAME机器人无法进行的海水进行主动采样(增加了检测生物标记的机会),还可以对所需海洋特性,可居住性度量标准和潜在生物标记进行时空分布测量(单个机器人无法实现) )。这些功能加在一起,将使科学家能够在NASA的首次海洋访问任务中更好地表征/了解外星海洋的组成和可居住性。
在第1阶段中,我们将通过以下两个主要任务,确立在距机器人母机多米的距离内无线操作SWIM机器人的基本可行性:
构建科学可追溯性矩阵的重点是在海冰界面执行NASA SESAME级机器人任务的科学目标。
进行微型游泳者设计贸易研究,以确定适当的机器人设计/大小,以便在预期的勘探范围和预期的海底海洋条件下使用可用的科学仪器。它将重点关注4个关键的小型子系统:科学仪器(MEMS传感器,光谱仪,照相机),执行器(超声波,压电,电机),通信(超声波)和电源(电池,能量收集器)。
14. Making Soil for Space Habitats by Seeding Asteroids with Fungi 通过用真菌播种小行星为人类太空栖息地制造土壤
Jane Shevtsov

背景和目标:任何大型、长期的太空栖息地都需要自己种植大部分食物和回收营养物,对于简单的补给任务而言,用水培方式种植农作物很有意义,但基于土壤的种植系统,对无法实现从地球上进行及时的物资补给的大型外太空基地,具有重要优势。
一种建议的栖息地设计是一个圆柱体,该圆柱体旋转以产生人工重力,并容纳多达8000人,用于小行星开采,太空制造和研究等目的。该栖息地在食物方面要自给自足,并有足够的绿色空间,既可以支持船员的心理健康,又可以作为生命支持系统的一部分。在这样的规模下,水培法将在所需的机械设备数量以及随之而来的故障点(例如泵和油管)扩散方面陷入困境。此外,水耕系统需要营养液,并且不容易将其用于农业和人类废物的循环利用,这在土壤系统中可以通过对废物进行堆肥(可能使用有效杀死病原体的嗜热方法)并结合使用来轻松实现。它进入土壤。
15. Light Bender 月球表面的光弯曲机
Charles Taylor

用于在Artemis任务和随后的“长期人类月球存在”的背景下在月球表面上产生和分配能量。创新的概念基于定日镜,该定日镜利用卡塞格林望远镜光学器件作为捕获,聚集和聚焦太阳光的主要手段。第二项关键创新是使用菲涅耳透镜来准直该光,以在不超过一千米的距离内将其分配给多个最终用户,而不会造成重大损失。然后,使用小型(直径2m-4m)光伏阵列将重定向并集中的太阳能转换为最终用户所在地的电能,该光伏阵列可安装在栖息地,低温冷却器或流动资产(如漫游车或ISRU元件)上。该概念优于诸如效率极低的激光功率束之类的替代方案,因为它仅将光一次转换为电能,以及依赖于大量电缆的传统配电架构。
Light Bender的价值主张是,与传统技术解决方案(例如,激光功率束或高压电力电缆上的配电网络)相比,质量降低约5倍。 Light Bender还以其他系统无法做到的方式,为月球表面永久阴影的月牙洼中的科学和ISRU系统提供动力。在初始设计中,主镜可捕获相当于48 kWe的太阳光。最终用户的电功率取决于到主要收集点的距离,但是根据包络分析的结果,在1公里之内至少有9kWe的连续功率可用,可与Kilopower规定的10kWe的输出相媲美。通过更改主要采集元件的尺寸,接收元件的尺寸,距离节点之间的距离,或者通过增加登陆的采集系统的数量,可以调整总系统功率水平。
第一阶段系统可行性和贸易研究将解决影响系统性能和操作适用性的系统设计的“已知未知数”。目前,有两个主要方面很重要:光学镜/透镜设计,以及该设计如何以机械结构表现出来,该机械结构旨在从较小的存放体积中自动展开。第一次分析需要创建详细的光学系统模型,并对元素设计,材料和涂层进行后续的贸易研究,以提供可提供可接受的光传播性能的解决方案。一旦设计完成,将评估自主部署的竞争方法。在进行了设计/可行性研究之后,将在持续的月球表面操作期间,在靠近月球南极的月球基地的背景下,对Light Bender的建筑替代方案进行评估。优异的主要表现是着陆质量的最小化。将与已知的配电技术进行比较,例如电缆和激光功率发射。
16. Solar System Pony Express 太阳系小马快递系统
Joshua Vander Hook
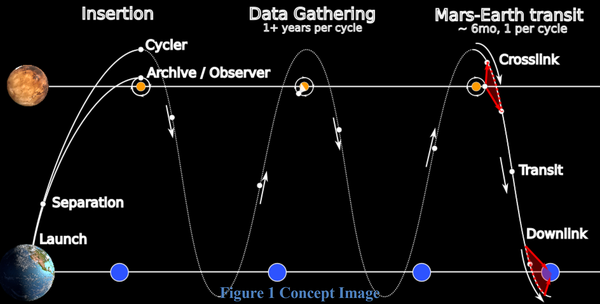
太阳系小马快递(Pony Express)系统是全球性的,多光谱,高分辨率的行星测量系统,在定期访问循环卫星网络的基础上,其定期访问以获取数据的petabits,并将其传送到地球。 “信使”卫星使用光通信,每年至少接收一次来自测量卫星的1-3千兆比特数据。然后它们会接近地球,在那里它们可以快速地传送数据。通过利用循环轨道,信使卫星仅需要最少的飞行器推进,它可以作为深空网络的补充和人类探索太空物流网络的先行者,运行数十年。
https://www.nasa.gov/directorates/spacetech/niac/2021_Phase_I/
